Earlier this semester we saw how we could generate piecewise linear approximations of circles using one of the following parameterizations:
where
This is clearly a generalization of the "simple 2D circle" parameterization since that circle can be generated using C = (cx, cy, 0), u = (1, 0, 0), and v = (0, 1, 0).
While curves based on conic sections are often parameterized using trigonometric functions like this, it is far more common to use polynomials of degree n when modeling other types of curves. We also typically use a different parameter variable (e.g., t, u, v, etc.) instead of θ since the parameter no longer refers to an angle, rather to some sort of distance measure along the curve. In the simplest case, this would look like:
where:
This form is not at all common as a general modeling representation because it is far too difficult to determine values for the various ak to achieve a desired shape. Even if we were given a set of ak that produced a shape close to what we wanted, it would be unreasonably complex to determine how to adjust the ak to tweak the shape in some particular fashion.
The form shown above is called the Power Basis representation of the curve. Polynomials of degree n form a vector space. The "polynomial vectors" of the Power Basis, namely (1, t, t2, …, tn), span this space, which means that any polynomial of degree n can be written as a linear combination of these quantities. (Nothing new there; you already knew that.)
There are many other families of (n + 1) polynomials that also span the space of degree n polynomials. One common one (that you have no doubt encountered in statistics applications) is the Bernstein Basis:
Like the Power Basis, any polynomial of degree n can be written as a linear combination of the Bi, n. Unlike the Power Basis, the Bernstein basis has a very nice property:

This means we can use them to form a functional Barycentric combination of (n + 1) points P0, P1, …, Pn:

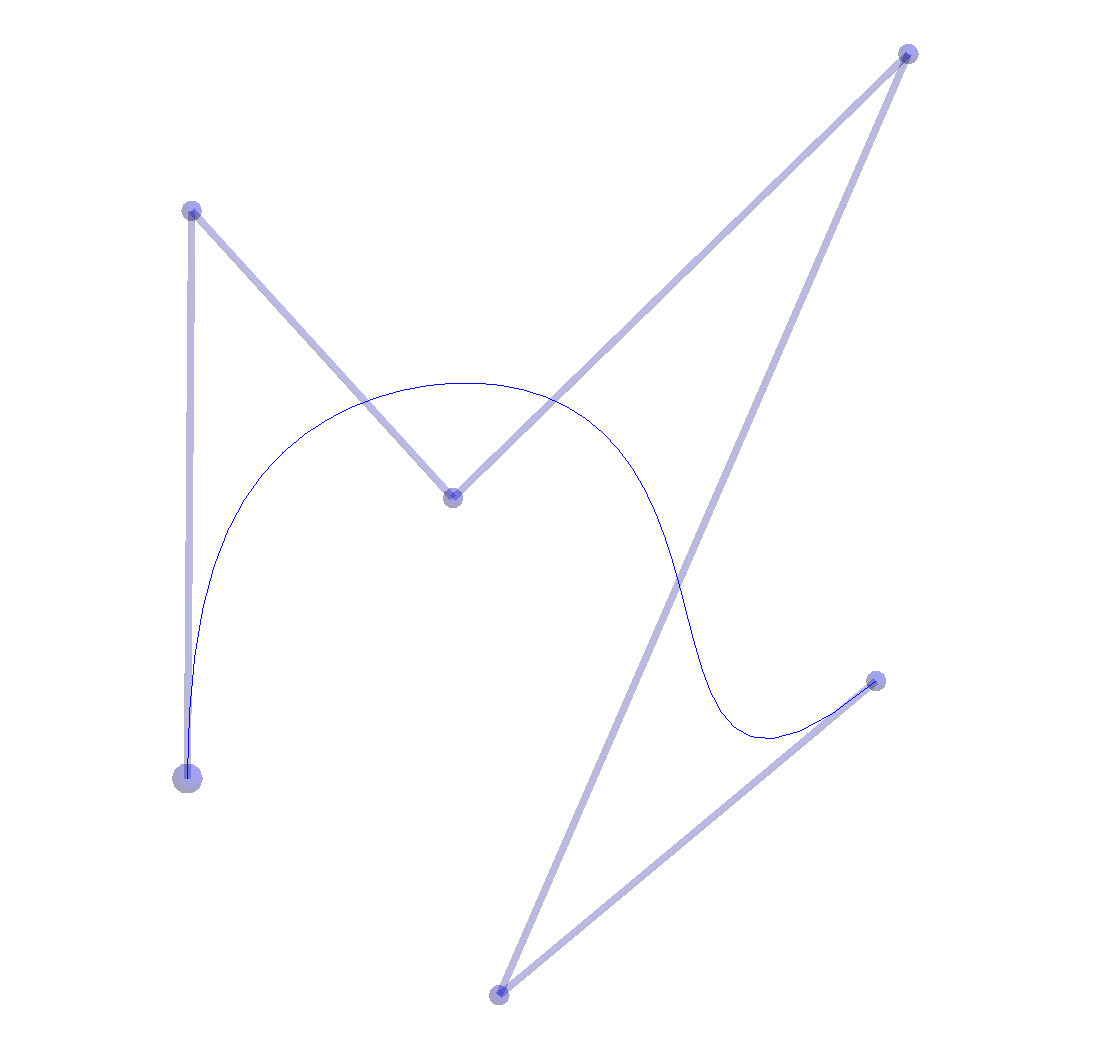
Why would we want to? For starters, C(t) will be a well-defined point for any value of t. (Right?) Moreover, it turns out that the set of points that result define a continuous curve with some very desirable properties. When drawn from t=0 to t=1, the curve starts at P0; it ends at Pn; and its shape follows that of the rest of the points in a very intuitive way. This means initial curve construction as well as subsequent modification can be extremely intuitive.
Note also the fact that on the interval 0 ≤ t ≤ 1, all of the Bi, n(t) are non-negative. Hence, the summation defining C(t) is a convex combination on this interval. Recall that any point, Q, formed as a convex combination of a set of points, Pi, will lie inside the convex hull of the Pi. This means the entire curve on 0 ≤ t ≤ 1 will lie inside the convex hull of the Pi, a property that also contributes to this form being particularly well-suited for interactive shape design.
A curve defined in this way is shown on the right and is called a Bezier Curve.
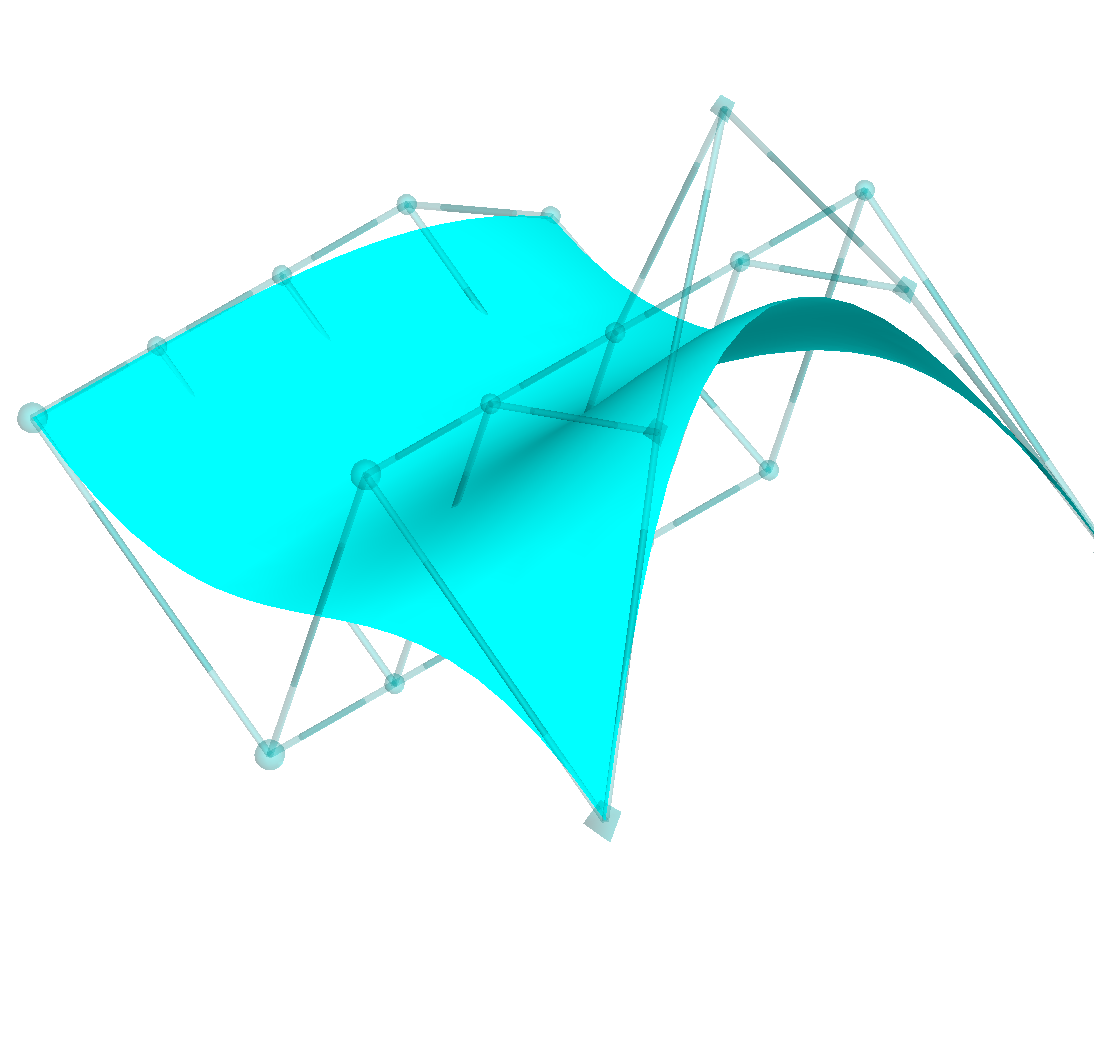
It turns out we can define a Bezier Surface in a similar way:
An example of such a surface with n=4 and m=3 is shown below.